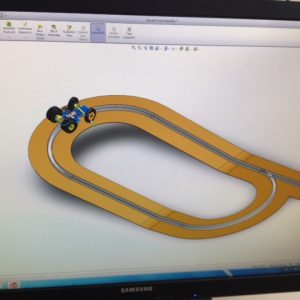
Once we knew what we wanted to do, all that was left was to do it! This was not a quick process however. We discovered that knowing what we wanted to do and knowing exactly how to go about doing it were quite different things. There was a lot of Googling involved. Thankfully, most of our design tools were popular and well documented, specifically Solid Works for the mechanical aspect and Arduino for the electronic and programming side of things. We also drew heavily on our previous experience, pulling ideas and skills from seemingly unrelated previous projects. During the early stages, there was not much programming as we focused more on building a basic test rig, even if it lacked sophisticated sensors and data communication. As such, Solid Works was used a lot. We would design the different components separately and then use CAD to see how it fit it within the larger assembly. There were many iterations to get it all right but eventually we completed it. Once we were satisfied with our CAD drawings, we took it to the workshop and had it produced.